多旅行商问题
汽车路由规划问题 VRP 算是 MTSP 的一个进阶
这个问题可以用 google 的 or-tools 求解,它的文档很详细,我这种人都能跑通一个小例子
这里记录我在实际应用中遇到的问题
单旅行商
这个是我最开始要单机规划的,我发现什么参数都不设置,会有两个问题
1、无法形成局部闭环,有"缺口"
这是旅行商问题本身导致的,因为这种问题它一定是每一个点访问一次,所以只要所有点在同一级别的问题上,就必然会有缺口
解决方案:如果一个 Path 需要闭环,那就求它的质心,然后把整个 Path 当作一个城市来处理。
这样,最终结果可能不是最优了,但是为了闭环,这是不得不作的解决方案。
等待结果求出来以后,再拿出聚合点的上一个点和下一个点,看聚合点里,选哪个点作为入口和出口合适。
否则,对于我这个例子里的圆环,求解器很愿意让两个车分别抄它的左右路,而不是当作一个环
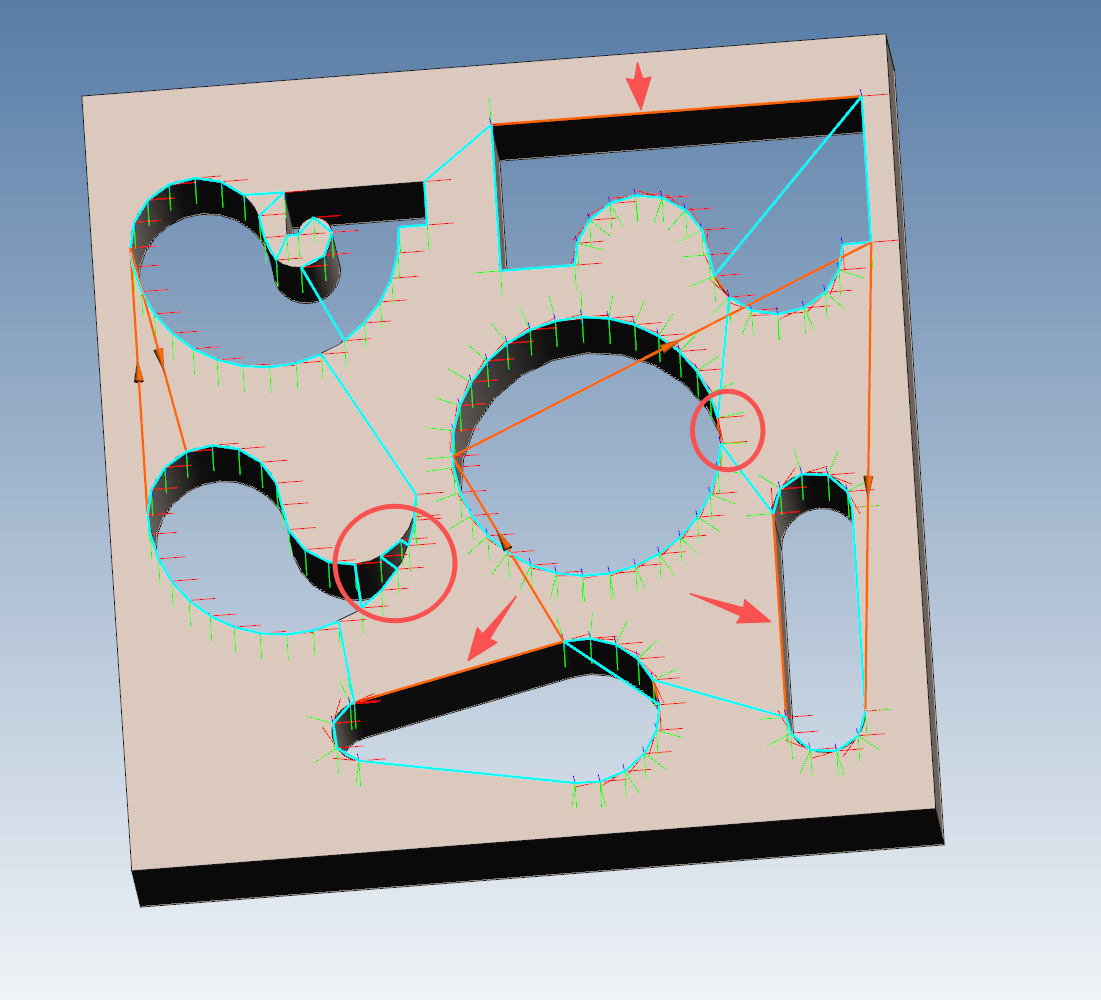
2、在尖点(锐角三角形处),容易左右跳跃
解决方案
(1)采取真实代价,这样需要求机器人工具转 180 度的代价,因此耗时陡增,会自动避免这个问题
(2)Path 内部给一个系数,即仅考虑位置时,我们把 Point 到下一个 Point 的代价设低
多旅行商
多旅行商时,如果我们给每个汽车的最大可执行时间设置的很高,那么求解器就会让一个车走完全程,另一个车不动
此问题(负载均衡)有以下解决方案:
(1)求解两次。第一次就让一个车走完,评估代价。然后对总耗时求均值,均值乘 1.3 作为一个上限,再求第二次。
(2)大概是这样设置一个全局总代价,但是这会导致求解时间极大的增长。必须多给时间,多求,这样结果才能好起来
RoutingDimension* mut_time_dimension = m_uptrRouting->GetMutableDimension("Time");
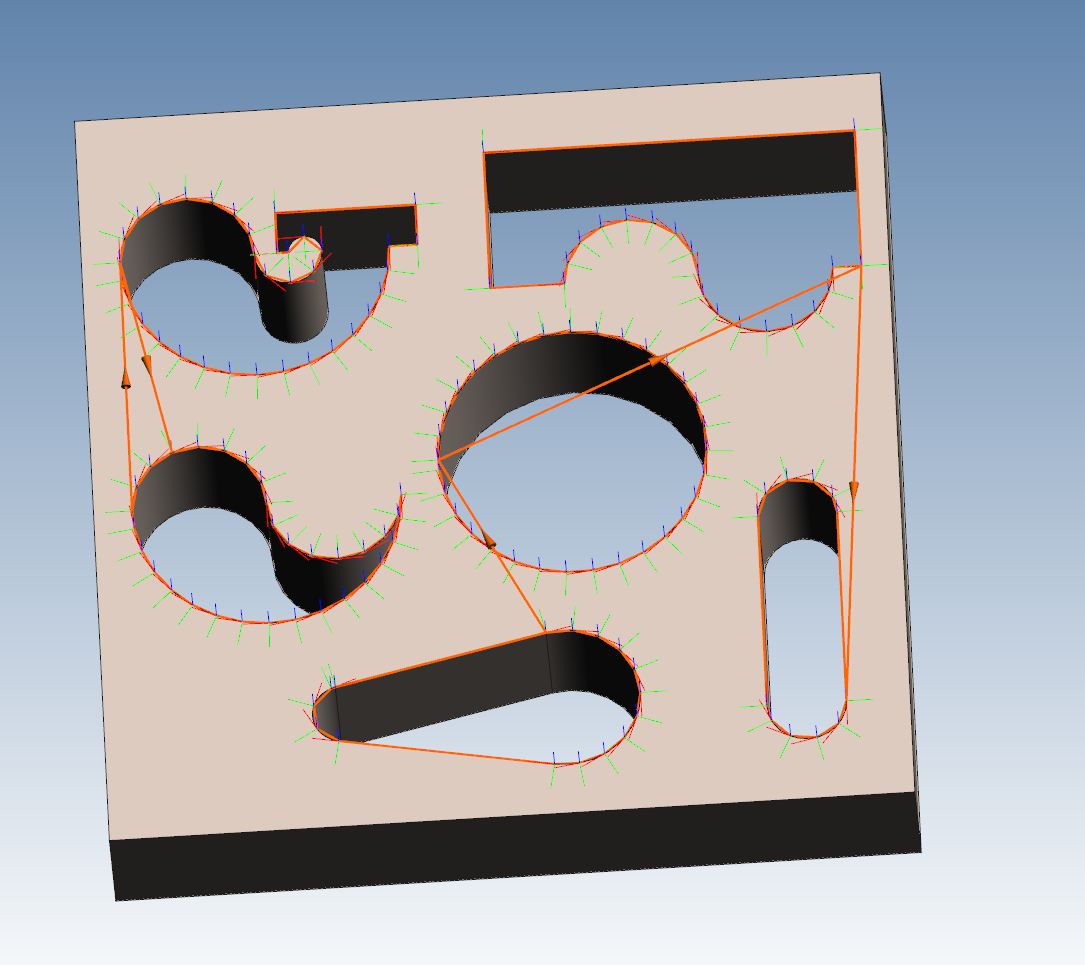
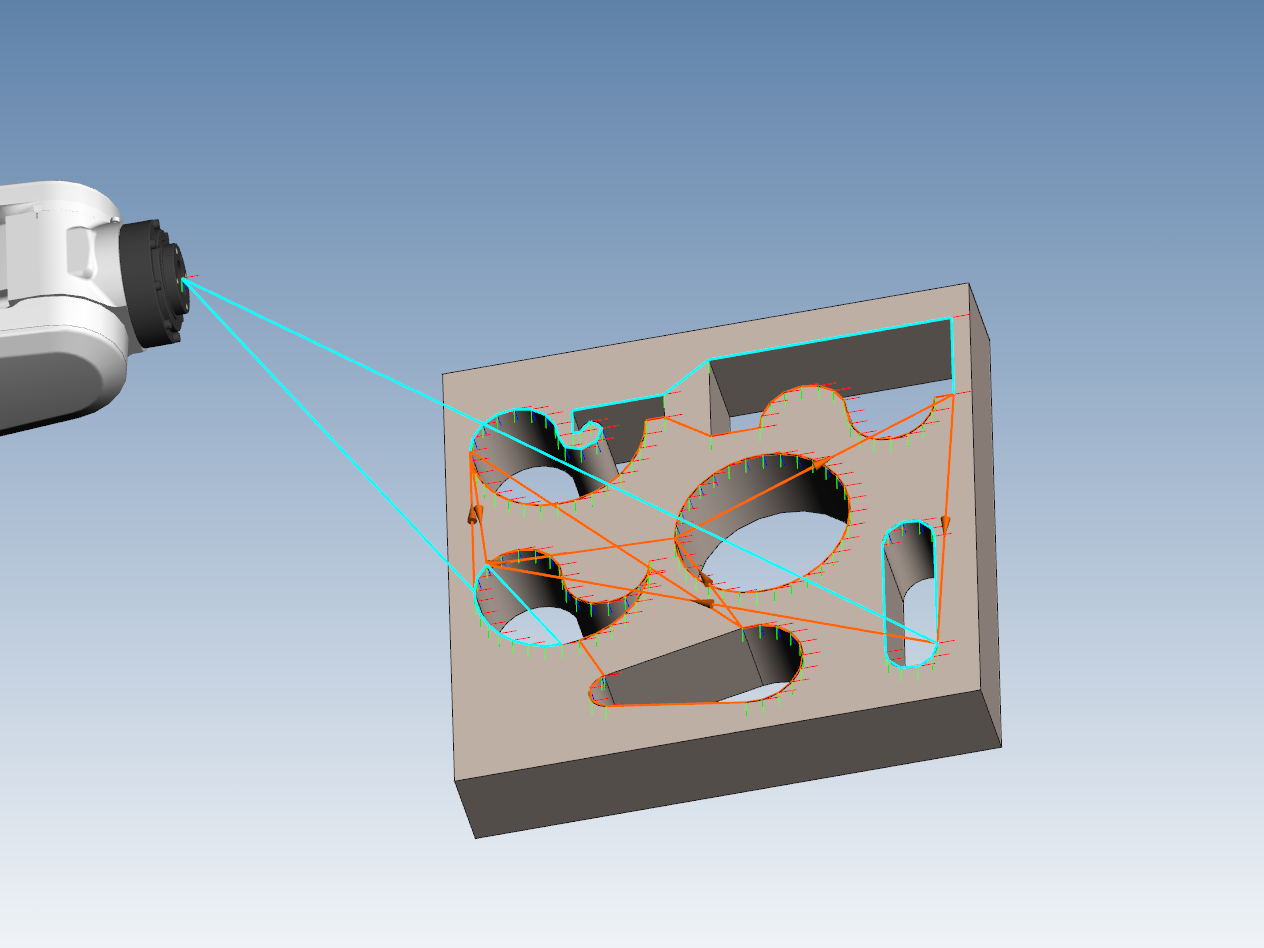
mut_time_dimension->SetGlobalSpanCostCoefficient(100);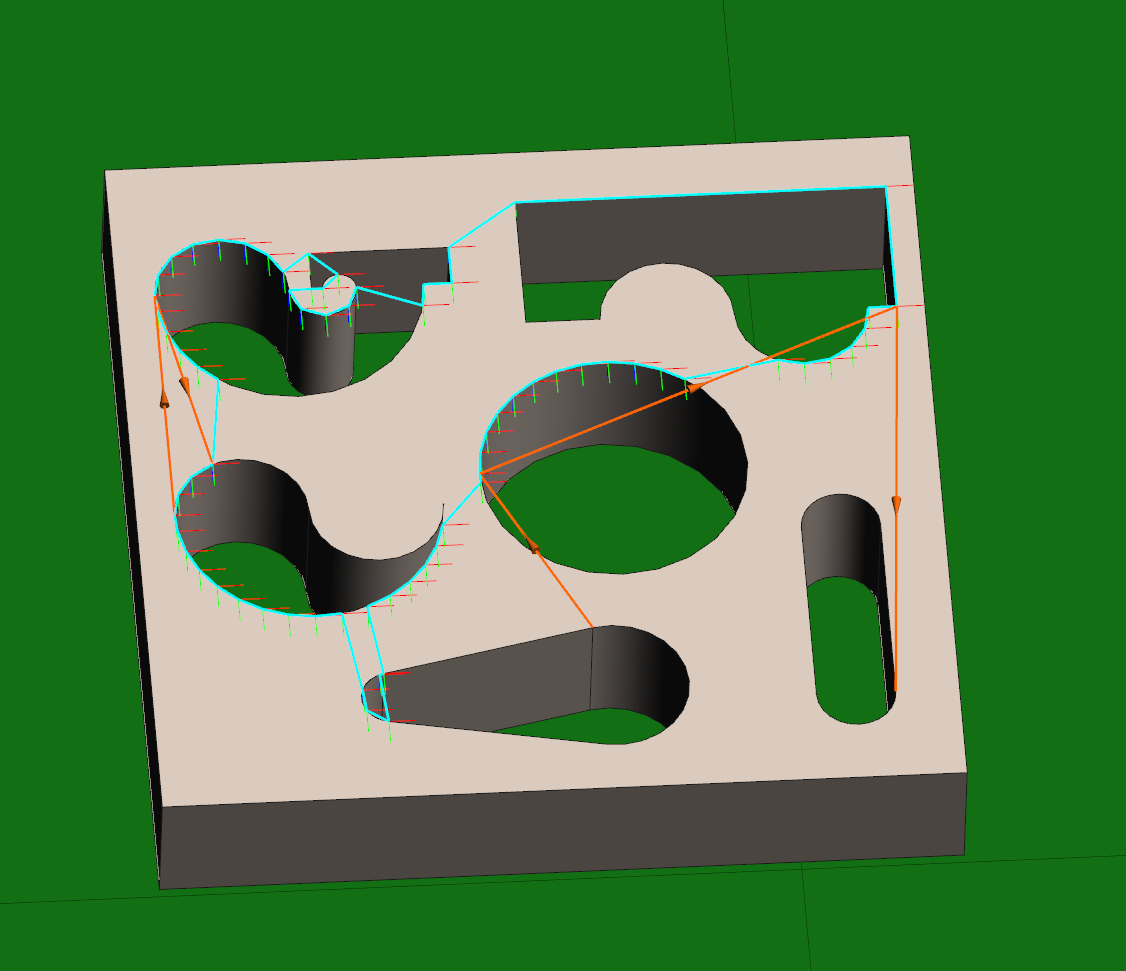 图片:双机器人,但无聚合点
图片:双机器人,但无聚合点
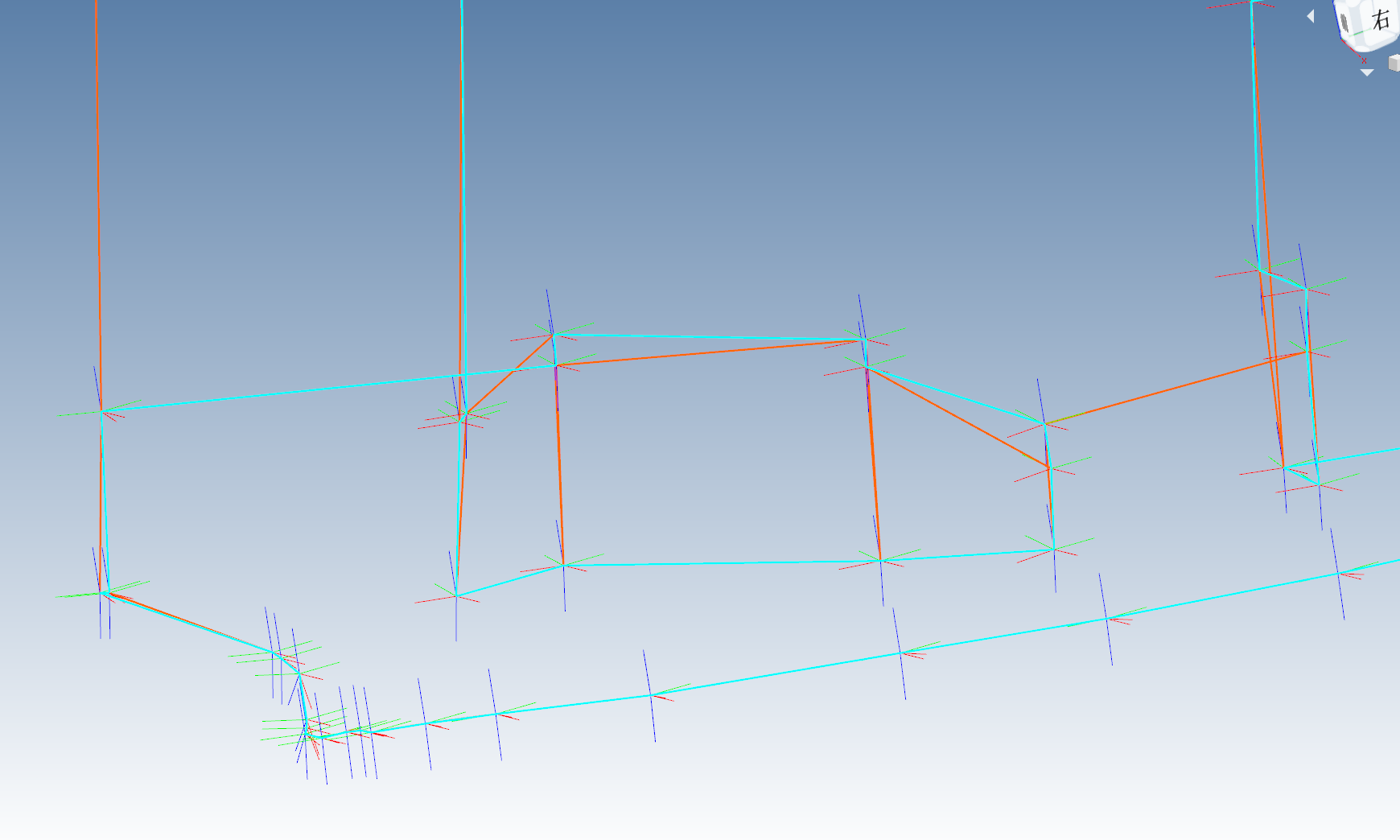
 图片:双机器人,并且相邻 Point 设置 0.1,以避免跳跃
图片:双机器人,并且相邻 Point 设置 0.1,以避免跳跃
车子起点随意
它是这样,如果你 Point 为 N 个,而且如果你的起点就落在这里面,那你可以直接在 RoutingIndexManager 构造时,设置好 starts 和 ends
但是如果你想随意开始,你必须增加一个虚拟开始节点,它文档上写的是,通过把起点的邻接矩阵的行列都设置为 0。这实际上相当于随意开始随意结束,因为实际上相当于车子随时可以回到虚拟点,并且随时再出发,但是由于 TSP 的限制,不会随意回来,所以你如果结尾点也是虚拟点,那么就是随意出发随意结束
这就会导致你的邻接矩阵变成 N+1
但是这只是思想层矩阵变大了,实际邻接矩阵是给回调函数用的,你可以依然让矩阵为 N,然后在回调函数里,如果越界,你就给 0
但是实际情况往往是,机器人需要从过渡点开始干活,干完活回来
所以一个合理的思想是,把起点和点直接加入到所有点里面,这样,你也不需要思考谁合理了,你的矩阵变为 N+2,起点到各个点的距离还可以自定义,也可以一定程度避免左机器人去右边干活
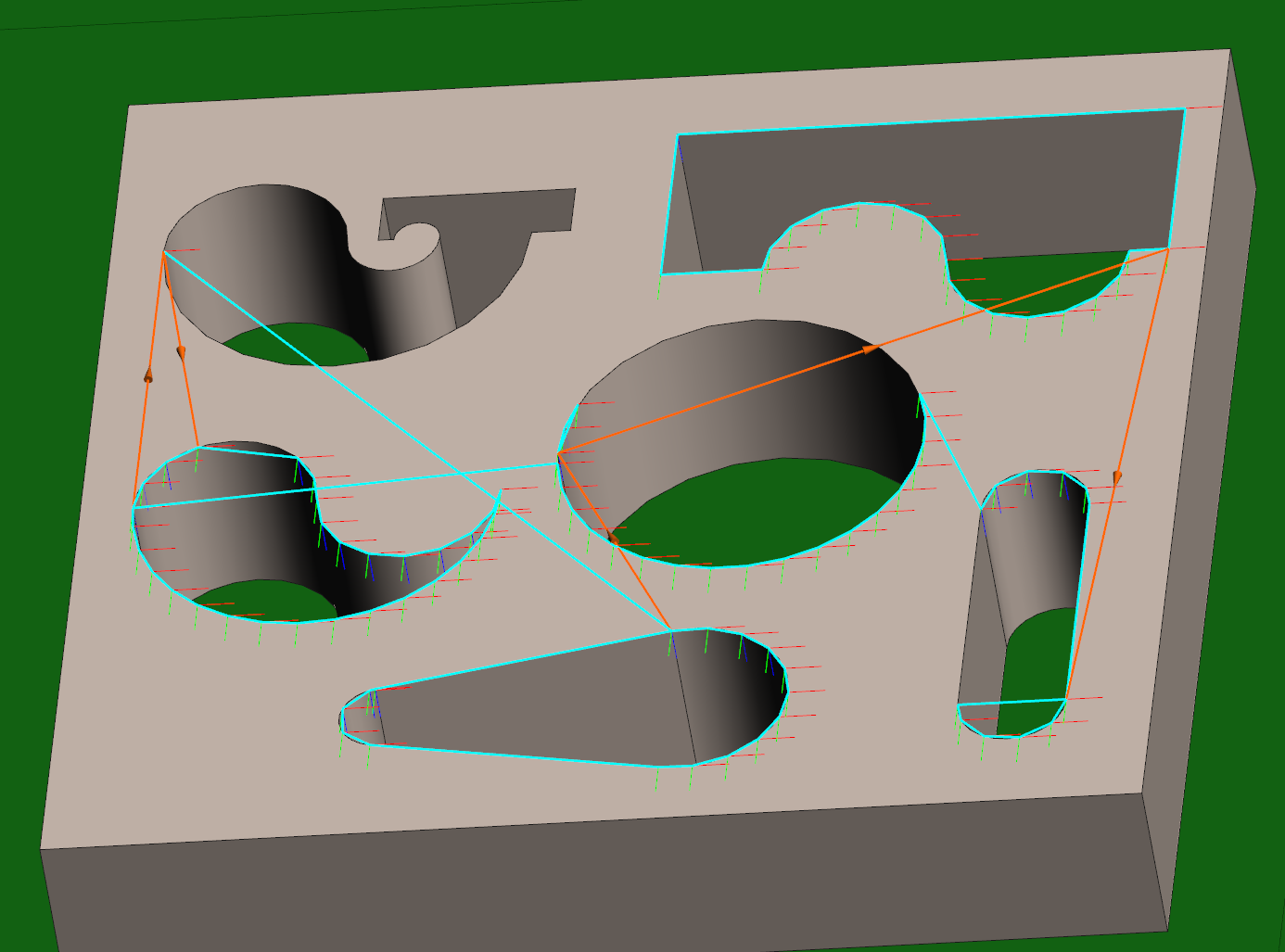
我这里试了一下,并没有避免"左机器人去右边干活",它是一个在外部干活,一个在内部,这样肯定会撞
并行计算
VRP 问题它是靠迭代来求的,依赖于前一步,所以这里必是单线程
要多线程只能宏观做
(1)多个 seed,从不同方向探索
(2)大问题拆小
轨迹规划
这个问题实际上和之前说的锐角三角形是同一个问题,如果你只管距离,那么就是会忽视掉焊点
甚至我认为,即使用机器人真实代价,也会忽视焊点,因为去焊点明显是更远的,平滑移动明显更省力
即无论是任何代价,我们都无法规划弓字形和之字形轨迹,因为这些轨迹要的就是“轨迹”,我们必须能找到“原始数据”,并且强制设置多个送货才能完成
所以轨迹按顺序给 0.1 的系数可能是必要的
在这个场景里,给系数就可以保证和原轨迹一致
疑惑:但是,如果真的给系数,那么我做 TSP 问题的意义何在?不还是依赖本身顺序吗?
问题分类
在二维平面内,如果每个点都有坐标,并且是算欧式距离。那么最优解的图,必定没有交叉,类似于构成一个多边形。
因为三角形两个边之和大于第三边。
并且 TSP 问题分为两种
经典的是,要求回到起点,构成闭环。此时,你的起点在哪里其实无所谓,你可以直接给 0,反正你是闭环。
如果只要求遍历所有城市,不要求闭环,那么就是一条线。此时考虑增加虚拟的仓库来算。
经典算法
最小生成树 MST(Prim、Kruskal):就是在一个图里,找到连接所有城市,如何最少花费来修路。只能说这个名字确实怪
迪杰斯特拉
A-Star
2-opt:如果路线中有两段边交叉了,那么解开这个交叉几乎总能得到一条更短的路线