数学基础
点积:用于求夹角,以及一个向量在另一个向量上的投影,或者说做分解。
叉积:用于区分内外,左右。eg:一个向量在另一个的左还是右,一个点在三角形内(三次叉积同向)
齐次坐标:通过对向量增加一个维度,使得不需要额外添加平移矩阵,而是直接用乘法就能乘出平移。
变换:常见的有平移、旋转、放缩。
绕点旋转:已知我们已经会做绕原点旋转。如果下一个旋转不在原点,我们可以把旋转点先平移到原点,然后转,再移动回来。
光栅化
光栅化 Rasterization:把 3D 物体实时的显示在计算机屏幕上的过程
实时:至少 30 fps
相机
相机:(相机需要三个东西才能定义)
1、位置
2、上方向(不仅仅需要视线,是因为比如我拿着相机了,我还可以上下颠倒相机)
3、视线
(说是三个,但其实一个位姿矩阵就可以定义出,实际上相机就相当于一个人的眼,也是需要这三个方向)
简化:
我们用平移法,将相机移动到原点,上方向为 Y,看向 -Z(右手系)
为什么看向 -Z,因为要模拟人眼,当 Z 轴指向屏幕外,那么你的人眼看纸张,就是刚好看 -Z 方向
成像原理
图形学的成像,类似小孔成像。
相机就相当于现实世界里小孔成像的小孔。
根据光路可逆性,实际上是从屏幕上的每一个像素点射出一条光线,经过小孔,打到虚拟世界中的一个物体的表面上,观察其颜色。
屏幕距离小孔的距离决定了 FOV,如果把屏幕替换为你的眼睛,那么很显然,你距离小孔越近,你能看到的范围也就越大。
其实再思考一下,屏幕实际上也在虚拟世界里有一个位置的。
视图变换
模型视图变换:模型全部移动到相机在原点时的相对位置
透视投影:相机是一个点,形成一个锥。好比我们前面说的小孔成像原理。
透视形成的根源是距离物体的远近,导致物体在视野里所占的角度发生了变化。它和凸透镜没有必然关联。
人眼类比的话,晶状体是一个凸透镜,成像平面是视网膜。和单反相机类似,镜头组是凸透镜,成像平面是 CMOS。但是计算机图形学里,它是类似小孔成像,所以并不好直接对比。
近大远小本质就是近的物体,在视锥体的,所占的角度更大(通过三角函数)。
正交投影:假设相机离得无限远。
正交投影理解:
如果你硬要在此处找一个屏幕的话,那么屏幕也是在无穷远,因为无穷远,所以光线经过小孔依然平行。
其实正交投影类似于平行光线/太阳光线打到物体上,或者一个液压机将物体压扁。
按照相机在原点,看向 -Z,你直接把物体的 Z 值扔掉,就是正交投影了(不考虑物体的前和后),类似丢掉一个维度(因为本质是物体的深度,即离你的远近,决定了透视关系种的占比的角度)
MPV 变换
不考虑旋转,通过平移和缩放,把空间中任意一个长方体,变换到原点的标准正方体
这三步,称之为** MVP **变换
1、Model 模型变换:确定模型在世界中的位置。这一步其实就是获取世界坐标系,因为很多物体都只记录基于父亲的局部坐标,需要把它们乘起来。【世界坐标】
2、View 视图变换:顶点从世界原点变换到观察空间(相机空间),将所有物体转换到以相机为原点的坐标系中。即求相对摄像机的位置。【观察坐标】
3、Projection 投影变换:将观察坐标转换为裁剪坐标。定义可视区域,并将 3D 坐标压扁到 2D 平面上。通常分为透视投影和正交投影。【裁剪坐标】
可视区域
视锥定义:
视锥体是只能在透视投影里用。因为小孔成像,所以视锥顶点相当于相机。
视景体定义:
视景体是只能在正交投影里用。类似于一个长方体,相当于直接从虚拟屏幕上,每个像素发射平行光线。
长宽比:屏幕的 16:9 这种参数
fov:在垂直方向上,最上和最下的夹角,这跟角度一般在 50~60(FPS 游戏里可能是水平的,因为 FPS 里很多 fov 都在 100 左右,两者可以互相求。所以 FPS 游戏是透视投影,也只有透视投影才有 fov。)
裁剪平面
无论是视锥体和视景体,都不是无限的。它都是有限长方体或者平头锥体,具有远近两个裁剪平面。
我们之前提到,我把虚拟屏幕放在了小孔后面,但是这样像是颠倒的。
所以现实情况是,反而把屏幕放在了相机前面,类似相机作为一个“黑洞”,吸引了一下所有的物体表面的颜色,最后被屏幕这张白纸挡住。
裁剪平面的存在,其根本原因是应对计算机世界,浮点数的精度有限。
近裁剪平面,可以避开极其接近相机的三角形。远裁剪平面,可以避开离得特别远的三角形。从深度缓冲区来考虑,避免极远的物体深度过大。
近裁剪平面:在第一人称里一般设置的很近,1cm,毕竟需要看武器(有时候物体和手套会关闭深度检测)。第三人称可能稍远。但是第三人称的摄像机和人物分离,如果你真能把相机紧贴在一个墙体后面,那确实能穿过。但是,相机外围有一个碰撞球,球的半径大于近裁剪平面,这导致还没出现异常,相机就闪开了。
包括相机无法一直拉近角色面部,拉近到某种程度就卡住了。这也是为了近的精度不至于太多,远处崩了。
视口变换
屏幕定义:
- 像素的二维数组
- 具有分辨率
- 光栅化
屏幕空间,左下角是原点。但是其实现实中,一个像素点的中心,应该在 (x+0.5,y+0.5) 这里。
经过了 MPV 变换,你的内容已经在一个标准的正方体以内。现在的目标是:将标准正方体,画在屏幕上。(说是正方体,其实是两个正方形,一个是投影变换后的二维图形,另一个是深度缓冲区?)
不管 z 向,只管 xy,拉伸到屏幕,称之为视口变换
采样、抗锯齿
在图形学里,都是三角面片。你的三角面片经过 MPV 变换,压缩到一个标准正方形里。再缩放到和屏幕一样大。
遍历屏幕里每个像素,取中心点,请问中心点在不在该显示的三角形内,在就显示,不在就不显示。
计算在不在内部,之前叉积已经提过了 -> 其实可以只采样三角形的包围盒内的点
Aliasing(jaggies)
走样(锯齿)因为分辨率低
Artifacts:瑕疵。锯齿,摩尔纹,车轮效应
必须先对源做模糊,然后采样,才能避免锯齿。而不是先采样,再模糊
为什么会产生锯齿:
我们思考一个图片的傅里叶变换
如果频谱上,应用高通滤波,则会留下图片中的边界,即像素剧烈变化的位置
如果低通滤波,则会模糊
说明高频=边界
采样率高频谱上间隔大?
似乎就是频域产生重叠?
那么你先模糊,就是先降高频,你采样率不足时,才有效果
你先采样,那就还是先采高频,再滤波就没用了
当然,还有就是超采样即可
一个像素采样 16 个点,然后按覆盖率算亮度
并不是提高分辨率,实际上,为了性能,多个点可能复用
MSAA
AA 为 Anti Aliasing
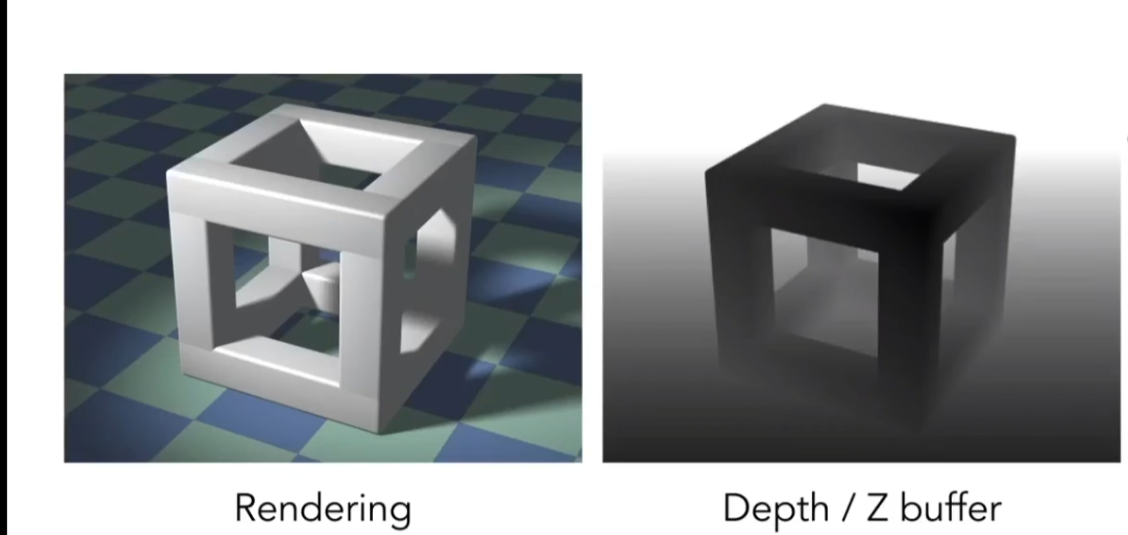
深度缓冲
可见性问题:
近的如何遮挡远的 -> 深度缓冲,Z-buffering
一个笨办法是(画家算法):先画远的,然后画近的,直接把远的盖住(覆盖)即可
问题:如果产生循环依赖的遮挡,就不清楚了
那么思路就转向:
给像素排序,每个像素,记录最小的深度
即,在渲染正常图片时,额外弄一个深度图,每个像素记录最小的深度,同时生成 深度=到相机距离绝对值,小的近
算法:
比如就取一个像素,你先渲染地板无所谓,先渲染地板,就记录地板,之后如果渲染了立方体,就更换为立方体(说明立方体遮挡地板)
没有那么复杂,就是永远拿最近的三角片,深度缓冲区只是一个记忆。类似找一个序列里最大的数,也得用 mymax 来记忆
优势:顺序无关系(三角)
比如你去街上 10 个商店买最便宜的,你并不需要按顺序走完商店,只需要走完 10 个,记得哪个最便宜即可
通过上面内容,我们已经可以渲染一个三角片了
着色
但是三角片一直是一个颜色(边缘通过反锯齿有渐变),但是总体还是一个颜色
shade n. 阴影
Shading:着色
着色:引入明暗和颜色的不同/对不同物体应用不同材质
为什么不同的球能看出来?因为不同的材质对光照有不同的算法
在一个需要着色的点上,局部极小平面
1、法线 n
2、观测方向 v
3、光照方向 l(指向光源)
点本身也有一些属性
着色时,每个点,只看自己,不考虑阴影
即一个点因为一些其它原因,处于其它物体的阴影内,不考虑
即局部光照,这样明暗变化就分明了
1、漫反射:
按照余弦定律 能量和光线法线夹角余弦正比
光源的能量:按照能量守恒,能量假设一直在一个球壳上,那就是越远越少
假设距离 1,强度是 I
根据球壳面积,应该和距离平方成反比
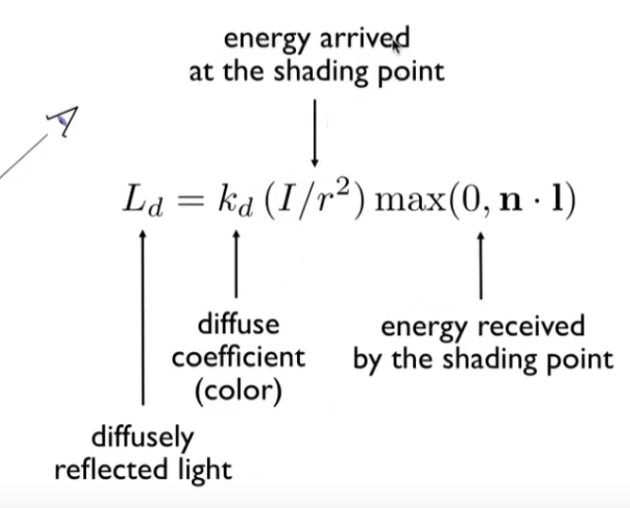
收到的能量 = 余弦,距离,材质(吸收率,因为点有颜色)
如果均匀反射,那么不管从哪看,都是一样的(漫反射,和视线 v 没有关系)
2、高光
假装它是镜子,镜面反射
当视向和反射很接近 = 法线和半程向量很接近
半程向量是 视向和光线方向的角平分线
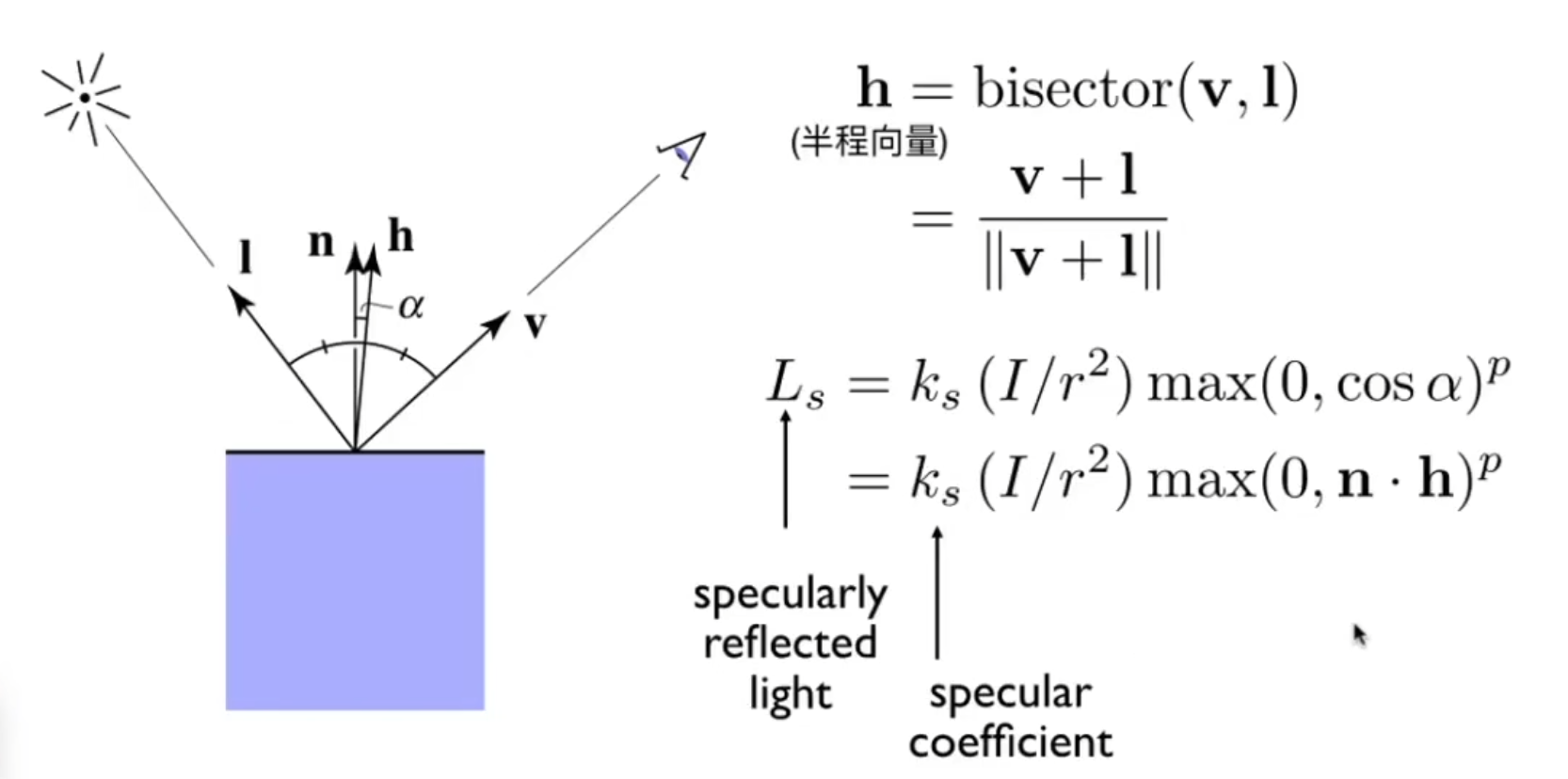
此时就不考虑 l 和 n 相乘了
3、环境光
某些点无法被光直射
我们假设任何一个点,接受环境光都是相同的,来自四面八方
因此和你观测的方向没关系
实际上就是一个常数
着色频率:
之前,着色应用在一个点上
现在
1、一个平面直接用一个点的着色结果(Flat Shading),一个三角片一个颜色(当模型复杂,面很多时,不一定会很差)
2、每个平面,按照顶点着色,然后三角形内进行插值过渡。(Ground Shading)--> 法线怎么求?
3、三角形内真正每一个像素上,进行着色(Phong Shading)
求法线:
1、三角片顶点的法线,是相邻面法线的加权平均(权是三角形面积)
2、逐像素法线?
因为三个顶点的法线知道了,三角形内部一个法线,可以通过插值求
把以上所有东西,模型,光照,渲染,合并到一起,叫做渲染管线
管线
从场景到一个图,到底发生了什么
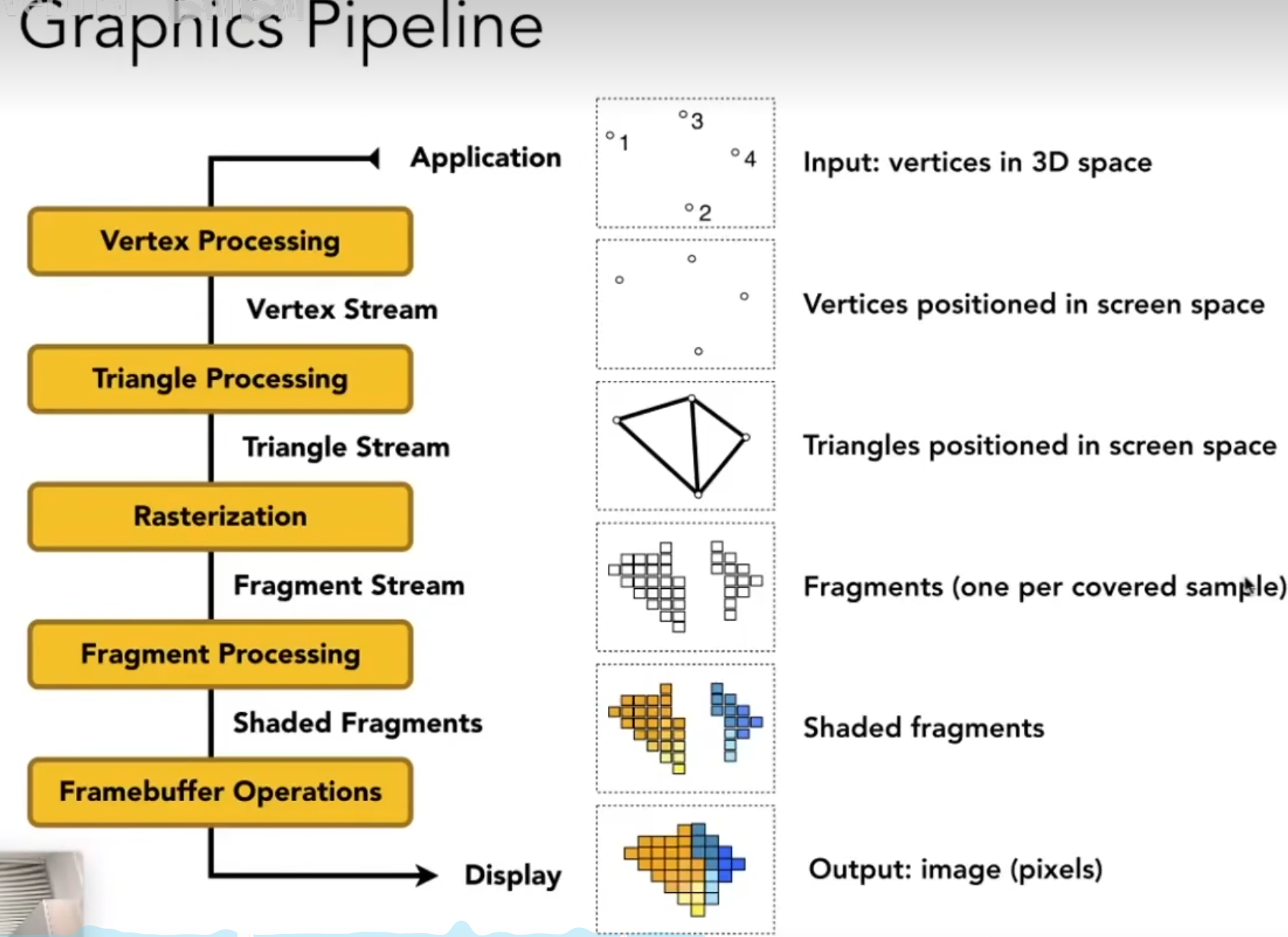
第一步之所以是一些点,其实可能本身这些点是原来模型的顶点
控制这个流程的东西,就叫做 shader
shader 是一些硬件能够执行的东西
每一个像素,都执行相同的语句
如果你写顶点的,就叫 vertex shader
如果写像素,就是 fragmenr shader(片段着色器)
纹理映射:
之前我们都是单一颜色的
现在我们有木板,这个木板是有纹路的,所以需要实时的更改每个点的反射系数
纹理图上通常用 uv 坐标,不管这个东西是不是正方形,分辨率,uv 取值都是 0 到 1
tiled 纹理(自复制无缝衔接)
普通光栅化的原理是:
从光源发出一束光,然后打到物体上,假装在局部平面做镜面反射
看反射光线和视线的夹角,求光照强度
仅反射一次,计算简单
光线追踪
原理:光路的可逆性。
假装从人眼(摄像机)发出光线
摄像机作为光源,向屏幕中每个像素点做投影
然后,每次该光线打到一个物体上,都做局部平面做镜面反射(或折射)
关键在于,同时计算能量损失,比如反射一次,损失为原来的 50%
反射光和折射光继续传播,递归运算,直到能量小于某个阈值
此后,将所有反射点考虑,如果该点能被真实光源照到,则计算
最后按照加权的方式,求出该像素的光照
为了减少光追的计算压力,我们会给空间进行划分:
(如果你无法想象空间,则你可以想象二维平面内的划分)
oct-tree 八叉树
每个象限等分
kd-tree
每次只划分一刀
这次 x 下次 y 再下次 z,每次划分点不是等分点,而是可以考虑更合理的比例